
| 品牌 : | 經(jīng)銳/APEX |
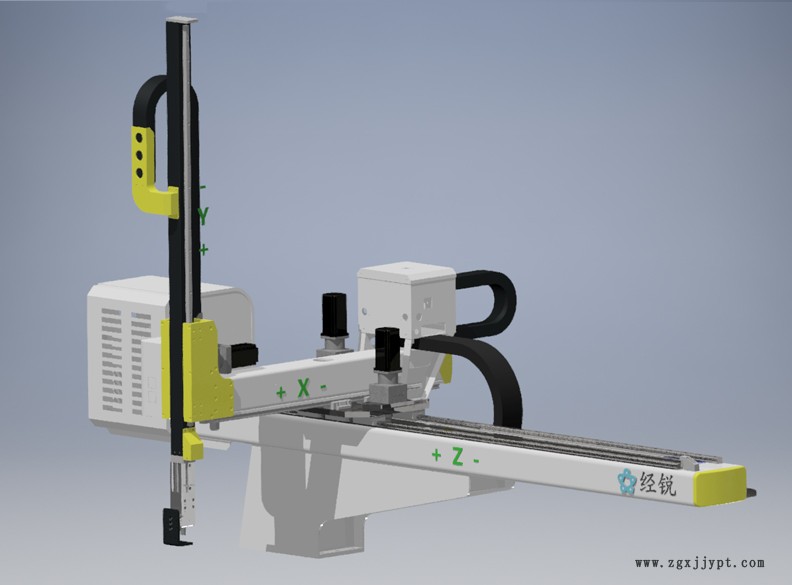
機(jī)械手的執(zhí)行機(jī)構(gòu)分為手部,、手臂、軀干,;手部安裝在手臂的前端,。手臂的內(nèi)孔中裝有傳動軸,,可把運(yùn)用傳給手腕,,以轉(zhuǎn)動、伸曲手腕,、開閉手指,。機(jī)械手手部的構(gòu)造系模仿人的手指,分為無關(guān)節(jié),、固定關(guān)節(jié)和自由關(guān)節(jié)3種,。手指的數(shù)量又可分為二指、三指,、四指等,,其中以二指用的比較多??筛鶕?jù)夾持對象的形狀和大小配備多種形狀和大小的夾頭以適應(yīng)操作的需要,。所謂沒有手指的手部,通常都是指真空吸盤或磁性吸盤,。2、手臂,,福建經(jīng)銳機(jī)械手價(jià)格,,手臂的作用是引導(dǎo)手指準(zhǔn)確地抓住工件,福建經(jīng)銳機(jī)械手價(jià)格,,并運(yùn)送到所需的位置上,。為了使機(jī)械手能夠正確地工作,手臂的3個(gè)自由度都要準(zhǔn)確地定位,,福建經(jīng)銳機(jī)械手價(jià)格,。3、軀干軀干是安裝手臂,、動力源和各種執(zhí)行機(jī)構(gòu)的支架,。
機(jī)械手的種類,按驅(qū)動方式區(qū)分為液壓式,、氣動式,、電動式、機(jī)械式機(jī)械手,;按適用范圍可分為專用機(jī)械手和通用機(jī)械手兩樣,;按運(yùn)動軌跡控制方式可分為點(diǎn)位控制和連續(xù)軌跡控制機(jī)械手等。機(jī)械手通常用作機(jī)床或其他機(jī)器的附加裝置,,如在自動機(jī)床或自動生產(chǎn)線上裝卸和傳遞工件,,在加工中心中更換***等,通常沒有獨(dú)立的控制裝置,。有些操作裝置需要由人直接操縱,,如用于原子能部門操持危險(xiǎn)物品的主從式操作手也常稱為機(jī)械手,。機(jī)械手在鍛造工業(yè)中的應(yīng)用能進(jìn)一步發(fā)展鍛造設(shè)備的生產(chǎn)能力,改善熱,、累等勞動條件,。

智能型注塑機(jī)械手:該類型機(jī)械手一般包括多點(diǎn)記憶置放、任意點(diǎn)待機(jī),、較多自由度等功能,,通常采用伺服驅(qū)動,能夠進(jìn)行比較大限度的仿人執(zhí)行比較復(fù)雜的操作,,還可以通過配備先進(jìn)的傳感器,,讓其具有視覺、觸覺和熱覺功能,,使其成為具有很高智能的注塑機(jī)器人,。械手按其他分類方式分類如下:驅(qū)動方式分為氣動,變頻,,伺服,。按機(jī)械結(jié)構(gòu)分為旋轉(zhuǎn)式,橫行式,,側(cè)取式,。按手臂結(jié)構(gòu)分為單截,雙截,。按手臂多少分為單臂和雙臂,。按X軸結(jié)構(gòu)分為掛臂式和框架式。按照控制程序的不同分為多套固定程式和可自主編輯程式,。按手臂可移動區(qū)分設(shè)備大小,,一般以100MM遞增。注塑機(jī)械手組成編輯注塑機(jī)械手的組成一般由執(zhí)行系統(tǒng),、驅(qū)動系統(tǒng),、控制系統(tǒng)等組成。執(zhí)行和驅(qū)動系統(tǒng)主要是為了完成手臂的正常功能而設(shè)計(jì),,通過氣動或液壓動力來驅(qū)動機(jī)械部件的運(yùn)轉(zhuǎn),,達(dá)到取物的功能。