
| 品牌 : | 經(jīng)銳/APEX |
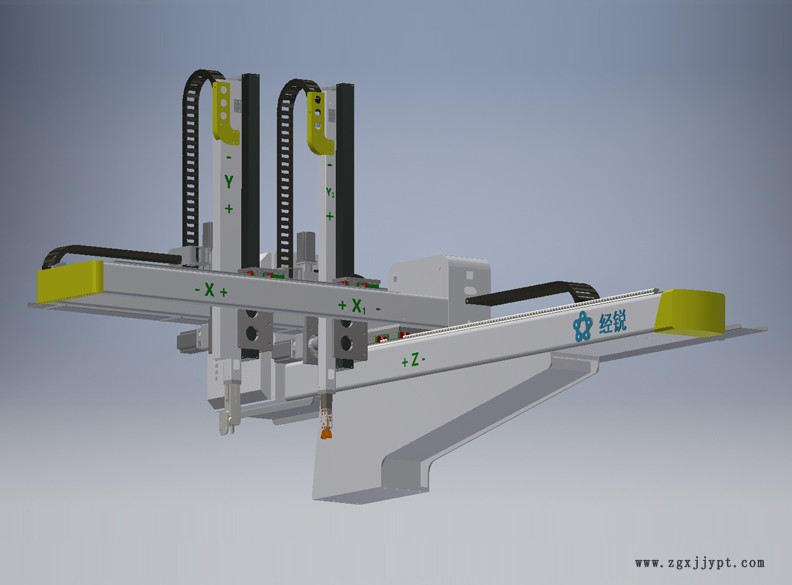
注塑機械手的組成一般由執(zhí)行系統(tǒng)、驅(qū)動系統(tǒng),、控制系統(tǒng)等組成,。執(zhí)行和驅(qū)動系統(tǒng)主要是為了完成手臂的正常功能而設(shè)計,通過氣動或液壓動力來驅(qū)動機械部件的運轉(zhuǎn),,達到取物的功能,,泉州射出機機械手廠家。操作者通過人機界面進行操作,,在機械手收到注塑機給出的可執(zhí)行信號時,,機械手切斷注塑機的可關(guān)模信號,保證機械手取物的可靠性,,在完成取物后機械手恢復(fù)注塑機的動作,,泉州射出機機械手廠家??刂葡到y(tǒng)的設(shè)計難點在于機械手與注塑機的協(xié)調(diào)工作關(guān)系,。在控制系統(tǒng)的指揮下,機械手按照預(yù)定的工作程序完成各個動作,,并且將注塑生產(chǎn)出的制品從模具中取出并傳送到指定地點或下一個生產(chǎn)工序中,。在設(shè)計時,,泉州射出機機械手廠家,應(yīng)根據(jù)注塑機的性能,、機械手的作業(yè)條件和要求,、制品的形狀和重量等來確定控制系統(tǒng)。
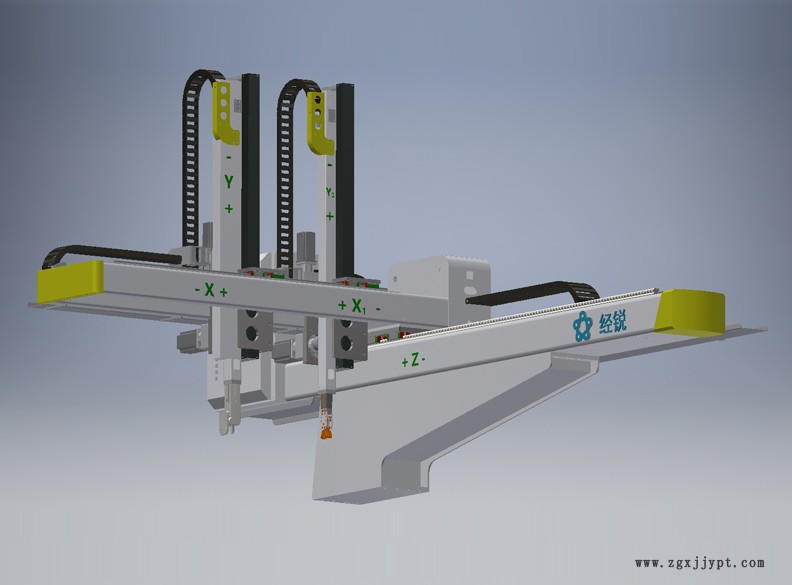
機械手設(shè)備:三軸/五軸可同動的CNC控制方式,,大幅提高射出機的生產(chǎn)效能,。2、 傳統(tǒng)取出機的定位精度在±0.1mm以內(nèi),,很好的運動重現(xiàn)性與靈活操控性,,于取出前、后可搭配各種周邊自動化設(shè)備的系統(tǒng)連結(jié),,可構(gòu)成隨機無人化的境界3,、配合周邊自動化可做模內(nèi)埋入、模外剪膠口,、修邊,、模外堆疊、裝箱等高精度動作4,、完全由手控器數(shù)位化調(diào)整X.Y.Z各軸行程,,配合治具校模每種生產(chǎn)模具只需要校模一次,下次上模完全免設(shè)定,,直接模組對應(yīng)即可,,很大提升人員的作業(yè)效率和可靠性。
保持機械手良好運行的要點之一是簡單的觀察和傾聽,,這樣做能夠暴露出機械手總體運行的許多信息,。機械手通過具體動作工作,所以傾聽任何不正常的聲音,,比如嘯叫,、咔嗒聲等,這些表明軸承不能正常旋轉(zhuǎn)或其它某個構(gòu)件被粘住,。機械手鏈接部分沿著裝有動力電纜和真空軟管的導(dǎo)軌運動,,會發(fā)出正常的滴答聲,但是這種聲音平滑穩(wěn)定,。檢查任何可以觀察到的軸承,,確保它們平穩(wěn)旋轉(zhuǎn)。只需要檢查并聆聽某些磨損或需要調(diào)整的征兆,,就可以**有助于保持機械手比較的運行狀態(tài),。標(biāo)準配置的機械手通常都安裝在成型設(shè)備的模板上。當(dāng)設(shè)備快速運行時,,來自成型設(shè)備的振動可能會傳遞到機械手上,,并可導(dǎo)致?lián)p壞,。簡單觀察成型設(shè)備的運行情況,保證模具運動被調(diào)整到合理狀態(tài),,減少晃動或振動次數(shù),,可以延長機械手的壽命。在高速運行情況下,,振動頻率可能會非常高,,盡量將機械手安裝在單獨于成型設(shè)備的支承結(jié)構(gòu)上。